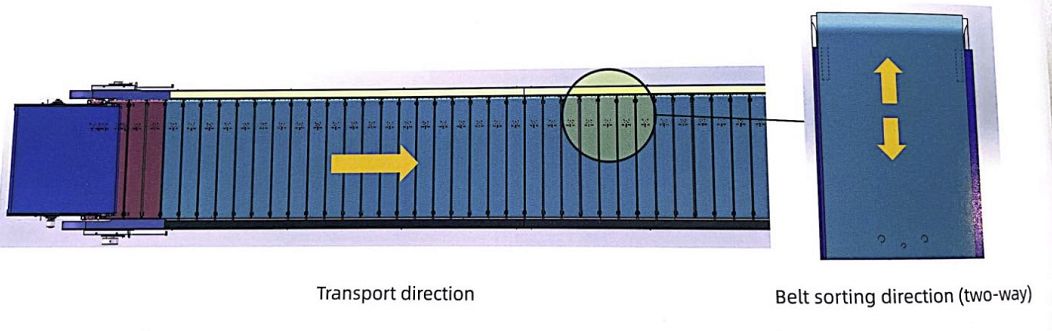
El classificador lineal de corretges creuades és impulsat per un motor a través d'una cadena per conduir els transports de corretges que porten paquets.Després que el sistema d'escaneig obtingui la informació de la canal i la mida, aixòactivar el mecanisme de desviació a la rampa a través de les demandes del PLC per fer que les corretges dels carros es moguin en la direcció de classificació un per un, per lliurar els paquets a la rampa i aconseguir el propòsit de classificar paquets.
| Article | Paràmetres | ||
| Potència del motor | 11 kW (30-40 m) | 15 kW (40-50 m) | 18,5 kW (50-60 m) |
| Ample de transport | 1000 mm | ||
| Velocitat de transport | 1,5 m/s | ||
| Distància central de les canals | 2200 mm | ||
| Màxima eficiència de classificació | 6000PPH (Longitud del paquet a 800 mm) | ||
| Mida màxima de classificació | 1600 X 1000 (LXW) | ||
| Pes màxim de classificació | 60 kg | ||
| Amplada del canal | 2400-2500 mm | ||
| Espai mínim entre parcel·les | 300 mm | ||
| Carrier pitch | 15,24 mm | ||
| Amplada del cinturó | 140 mm | ||
| Angle de canvi | 1000 mm d'amplada amb 25 graus, 1200 mm d'amplada amb 32 graus | ||
| Vàlvula solenoide | |||
| Article | Paràmetres | |||
| Potència del motor | 9 kW (30-40 m) | 11 kW (40-50 m) | 15 kW (50-60 m) | 18,5 kW (60-100 m) |
| Velocitat de transport | 2-2,2 m/s | |||
| Amplada mínima de les canals | 1000 mm | |||
| Màxima eficiència de classificació | 8500PPH (Longitud del paquet a 400 mm) | |||
| Potència del motor de tambor elèctric | 300W | |||
| Pes de càrrega | 60 kg/m | |||
| Amplada del canal | 2400-2500 mm | |||
| Carrier pitch | 15,24 mm | |||
| Amplada del cinturó | 126 mm | |||
Aplicació
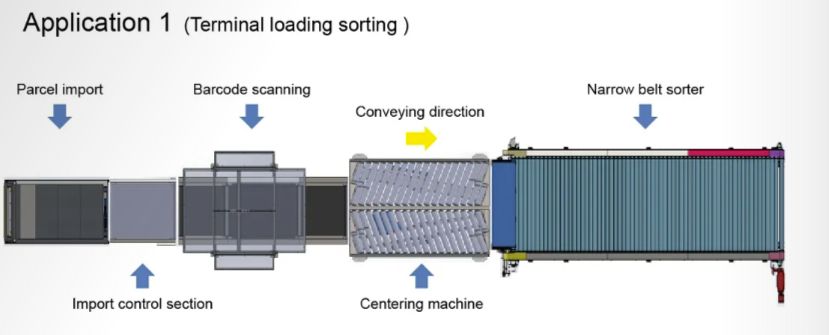
Ordenació de càrrega terminal
1. Els paquets es van importar mitjançant una cinta transportadora telescòpica o altres mètodes a la línia de classificació.
2. Els paquets van ser controlats per la secció de control d'importació per aconseguir la distància del paquet i després de llegir la informació de la graella del codi de barres i la informació de les dimensions.
3. Classificador de cinturó estret a la graella designada després de passar a través de la màquina centradora.
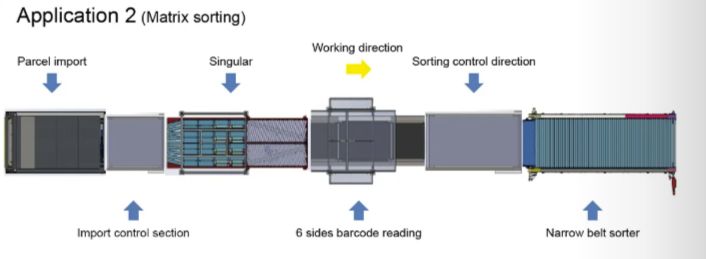
Ordenació matricial
1. Els paquets es van importar mitjançant una cinta transportadora telescòpica o altres mètodes a la línia de classificació.
2. Els paquets es van transportar d'una sola peça després de la lectura del sistema singular i després de llegir la informació de la graella del codi de barres i la informació de les dimensions.
3. El classificador de cinturó estret classifica els paquets a la graella designada després de la secció de control.
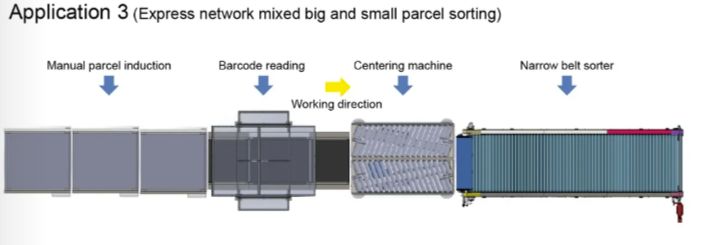
Flux en funcionament del sistema
1. Col·loqueu manualment paquets al cinturó d'inducció i cada cinturó només permet un paquet perquè cada paquet es controli.
2. Es va llegir la informació de la faixa i les dimensions del paquet a partir de la lectura del codi de barres.
3. Els paquets classificats cauen a la faixa designada després de centrar la màquina.
Casos in situ